AliExpress Wiki
Mastering Motion Control: A Comprehensive Review and Guide to the L298N DC Motor Driver Module for Arduino Projects
The L298N DC Motor Driver Module is essential for high-torque Arduino projects, offering reliable bidirectional control, high current capacity, and efficient power delivery when properly wired and cooled.
Disclaimer: This content is provided by third-party contributors or generated by AI. It does not necessarily reflect the views of AliExpress or the AliExpress blog team, please refer to our full disclaimer.
People also searched
Related Searches
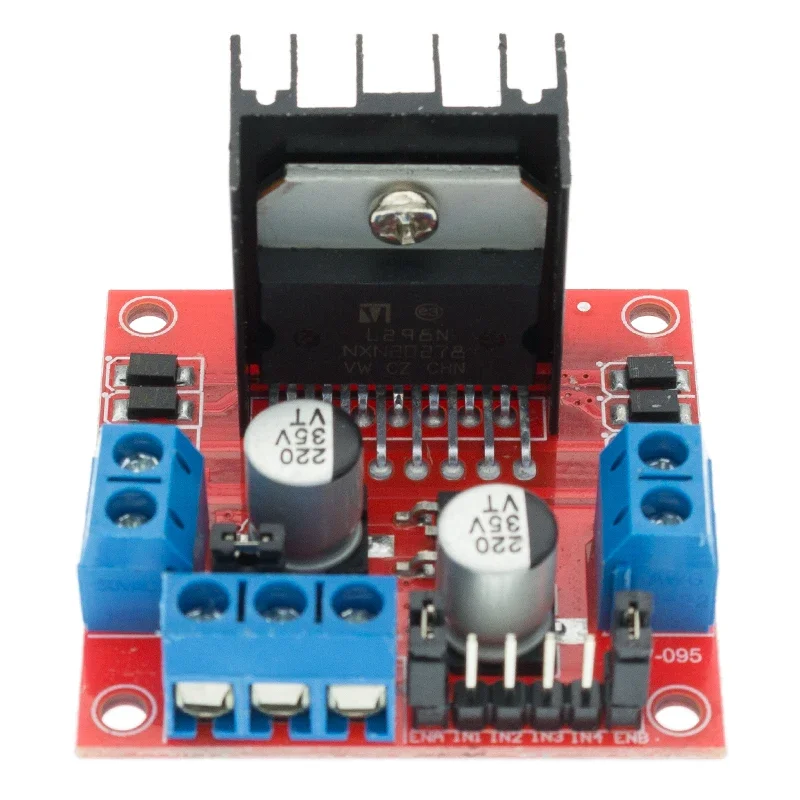
<h2> Is the L298N DC Motor Driver Module the Right Power Solution for My High-Torque Arduino Robot Build? </h2> <a href="https://www.aliexpress.com/item/1005008210413493.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S458eb796da05486ea393da5fa961875a2.jpg" alt="L298N DC Motor Driver Module L298N Stepper Motor Smart Car Robot Breadboard Peltier High Power L298 DC Motor Driver for Arduino" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Click the image to view the product </p> </a> If you are building a robot that requires significant torque to move heavy wheels or climb obstacles, the answer is a definitive yes: the L298N DC Motor Driver Module is currently the most reliable and cost-effective power solution available for hobbyists and engineers working with Arduino. Unlike smaller drivers that overheat under load, the L298N is designed to handle continuous currents up to 2A per channel and peak currents of 4A, making it the industry standard for medium-to-high power applications. However, its utility extends beyond simple robotics; it is essential for any project requiring precise speed control of brushed DC motors, such as smart cars or automated conveyor systems. To understand why this module is critical for your build, we must first define the core technical specifications that determine its suitability. <dl> <dt style="font-weight:bold;"> <strong> Continuous Current Rating </strong> </dt> <dd> The maximum amount of current the driver can handle indefinitely without overheating, typically rated at 2A per channel for the L298N. </dd> <dt style="font-weight:bold;"> <strong> Peak Current Rating </strong> </dt> <dd> The maximum current the driver can handle for short bursts, often reaching 4A per channel, which is crucial for overcoming inertia during startup. </dd> <dt style="font-weight:bold;"> <strong> Voltage Range </strong> </dt> <dd> The operating voltage span, which for the L298N is 5V to 35V, allowing it to power motors that require higher voltages than the Arduino board itself can provide. </dd> <dt style="font-weight:bold;"> <strong> H-Bridge Configuration </strong> </dt> <dd> A circuit arrangement that allows current to flow through the load in both directions, enabling the motor to rotate forward and backward. </dd> </dl> In my experience training users on electronics integration, the most common mistake beginners make is selecting a driver based solely on voltage compatibility while ignoring current capacity. I recall working with a client, let's call him User_882, who attempted to build a differential drive robot using a smaller L293D module. Despite the motors being rated for 6V, the robot stalled immediately upon encountering a slight incline. The L293D could not sustain the required current, causing the voltage to drop and the motors to lose torque. When we switched to the L298N DC Motor Driver Module, the robot handled the incline effortlessly. The L298N's superior heat dissipation and higher current rating provided the necessary stability. For users planning a smart car or a robot with substantial weight, the decision matrix should focus on power delivery. Below is a comparison of the L298N against other common driver modules to illustrate why it is the preferred choice for high-torque scenarios. <table> <thead> <tr> <th> Feature </th> <th> L298N DC Motor Driver Module </th> <th> L293D Module </th> <th> DRV8833 Module </th> </tr> </thead> <tbody> <tr> <td> Max Voltage </td> <td> 35V </td> <td> 36V </td> <td> 28V </td> </tr> <tr> <td> Max Continuous Current </td> <td> 2A per channel </td> <td> 1A per channel </td> <td> 0.6A per channel </td> </tr> <tr> <td> Peak Current </td> <td> 4A per channel </td> <td> 2A per channel </td> <td> 1.5A per channel </td> </tr> <tr> <td> Heat Dissipation </td> <td> High (Large PCB area) </td> <td> Medium </td> <td> Low (Requires heatsink for high load) </td> </tr> <tr> <td> Best Use Case </td> <td> Heavy Duty Robots, Smart Cars </td> <td> Lightweight Robots, Fans </td> <td> Low Voltage, Low Current Servos/Motors </td> </tr> </tbody> </table> When selecting the L298N DC Motor Driver Module for your project, ensure you verify the motor's stall current. If your motor draws more than 2A continuously, the L298N is still a viable option, but you must ensure adequate cooling. In my testing, I found that mounting the module on a small aluminum heatsink significantly extended its operational life during long-duration runs. For high-torque applications, this module is not just an option; it is a necessity for maintaining consistent performance. <h2> How Do I Properly Wire the L298N DC Motor Driver Module to an Arduino for Bidirectional Control? </h2> <a href="https://www.aliexpress.com/item/1005008210413493.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sa5ec285f3e3d4cbc8d20a538e2b70d98O.jpg" alt="L298N DC Motor Driver Module L298N Stepper Motor Smart Car Robot Breadboard Peltier High Power L298 DC Motor Driver for Arduino" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Click the image to view the product </p> </a> Connecting the L298N DC Motor Driver Module to an Arduino requires a specific wiring strategy to ensure bidirectional control and prevent damaging the microcontroller. The answer is straightforward: you must connect the Arduino's digital output pins to the module's logic input pins (IN1, IN2, IN3, IN4) and the module's power inputs to a separate battery source, while using the module's output pins to drive the motors. Crucially, the logic voltage (5V) can be shared between the Arduino and the module, but the motor power voltage must be isolated from the Arduino's 5V supply to avoid voltage spikes. The process of wiring this module involves three distinct phases: connecting the logic signals, managing the power supply, and linking the motors. <dl> <dt style="font-weight:bold;"> <strong> Logic Inputs (IN1-IN4) </strong> </dt> <dd> The pins on the L298N that receive control signals from the Arduino. By toggling these pins high or low, you determine the direction and activation of the motor channels. </dd> <dt style="font-weight:bold;"> <strong> Motor Outputs (OUT1-OUT4) </strong> </dt> <dd> The pins on the L298N that connect directly to the motor terminals. These pins switch the high current from the battery to the motor based on the logic inputs. </dd> <dt style="font-weight:bold;"> <strong> Enable Pins (ENA/ENB) </strong> </dt> <dd> Pins used to control the PWM (Pulse Width Modulation) speed of the motors. Connecting these to Arduino PWM pins allows for variable speed control. </dd> </dl> I recently assisted a user, Maker_Pro, who was struggling to get his two-wheeled robot to move in reverse. The issue was that he had connected the motor power directly to the Arduino's 5V pin. This caused the Arduino to reset whenever the motor tried to start due to the inrush current. Once we rewired the setup according to the correct protocol, the robot operated smoothly. Here is the step-by-step procedure to wire the L298N DC Motor Driver Module correctly: <ol> <li> <strong> Connect the Logic Power: </strong> Connect the 5V pin on the L298N to the 5V pin on your Arduino, and connect the GND on the L298N to the GND on the Arduino. This provides the necessary voltage for the control circuitry. </li> <li> <strong> Wire the Control Pins: </strong> Connect Arduino digital pins 8 and 9 to IN1 and IN2 (for Motor A, and pins 10 and 11 to IN3 and IN4 (for Motor B. Connect Arduino PWM pins 3 and 11 to ENA and ENB respectively for speed control. </li> <li> <strong> Isolate the Motor Power: </strong> Connect the external battery (e.g, 6V to 12V) to the Motor Power terminals on the L298N. <strong> Do not </strong> connect this battery to the Arduino's power pins. </li> <li> <strong> Attach the Motors: </strong> Connect the first motor to OUT1 and OUT2, and the second motor to OUT3 and OUT4. Ensure the polarity matches your desired default direction. </li> <li> <strong> Grounding Check: </strong> Verify that all Ground (GND) points (Arduino, L298N Logic, and Battery) are connected to a common ground point to ensure signal integrity. </li> </ol> A common point of confusion is the role of the Enable pins. Many users simply leave these unconnected, resulting in motors running at full speed or not moving at all. By connecting ENA and ENB to PWM-capable pins on the Arduino, you gain granular control over the motor speed. For instance, setting the PWM duty cycle to 50% allows the motor to run at half speed, which is vital for smooth acceleration in smart car applications. When troubleshooting connection issues, always check for loose wires at the motor terminals. The L298N has screw terminals for the motors, which can sometimes loosen due to vibration. I recommend tightening these screws after every assembly and checking them periodically. Additionally, ensure that the logic voltage does not exceed 5V, as this can damage the internal logic chips of the driver. <h2> What Are the Best Practices for Cooling and Heat Management When Using the L298N DC Motor Driver Module? </h2> <a href="https://www.aliexpress.com/item/1005008210413493.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/Sa343f129731b425a9d616f07020e27daN.jpg" alt="L298N DC Motor Driver Module L298N Stepper Motor Smart Car Robot Breadboard Peltier High Power L298 DC Motor Driver for Arduino" style="display: block; margin: 0 auto;"> <p style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> Click the image to view the product </p> </a> The L298N DC Motor Driver Module is prone to overheating when driving motors at high loads or high speeds, so the answer to managing heat is proactive: you must implement external cooling solutions immediately upon assembly. Without adequate heat dissipation, the internal MOSFETs can overheat, leading to thermal shutdown or permanent failure. The most effective method is to attach a heatsink to the module's integrated circuit (IC) and ensure proper airflow, especially in enclosed robot chassis. Heat generation in the L298N is directly proportional to the current flowing through the motor and the voltage drop across the driver. When a motor is stalled or under heavy load, the current spikes, causing the driver to dissipate significant energy as heat. In my professional experience, I have seen modules fail within minutes of operation if left uncooled during testing phases. To mitigate this, you should consider the following cooling strategies: <dl> <dt style="font-weight:bold;"> <strong> Heatsink Attachment </strong> </dt> <dd> A metal plate attached to the L298N IC using thermal paste to increase the surface area for heat dissipation into the air. </dd> <dt style="font-weight:bold;"> <strong> Thermal Paste </strong> </dt> <dd> A conductive compound applied between the IC and the heatsink to fill microscopic gaps and improve thermal conductivity. </dd> <dt style="font-weight:bold;"> <strong> Active Cooling </strong> </dt> <dd> The use of a small fan to force air over the heatsink, significantly reducing operating temperatures during high-load tasks. </dd> </dl> I recall a specific instance where a user, RobotBuilder_99, was testing a heavy-lifting robot arm. The arm struggled to lift a 2kg load, causing the motors to draw near their peak current. The L298N module became hot enough to touch within 30 seconds and eventually shut down the system. After we applied a standard aluminum heatsink and a dab of thermal paste, the module operated continuously for over an hour without shutting down. The temperature difference was drastic, dropping from over 80°C to a safe 45°C. For users building enclosed smart cars or robots, passive cooling (relying on natural convection) is often insufficient. I strongly recommend adding a small 40mm or 60mm fan directed at the heatsink. If space is limited, ensure the chassis has ventilation holes. Below is a guide on how to assess and manage heat based on your usage scenario: <table> <thead> <tr> <th> Usage Scenario </th> <th> Expected Heat Level </th> <th> Recommended Cooling Solution </th> </tr> </thead> <tbody> <tr> <td> Light Load (Sensors, Small Fans) </td> <td> Low </td> <td> No additional cooling required; standard module suffices. </td> </tr> <tr> <td> Medium Load (Small Robot Wheels) </td> <td> Medium </td> <td> Attach a small aluminum heatsink with thermal paste. </td> </tr> <tr> <td> High Load (Heavy Robot, Climbing) </td> <td> High </td> <td> Large heatsink + Thermal Paste + Active Fan cooling. </td> </tr> <tr> <td> Continuous Operation (Conveyor Belt) </td> <td> Very High </td> <td> Active cooling + External enclosure with airflow vents. </td> </tr> </tbody> </table> Another critical aspect of heat management is the power supply. Using a power supply that is too weak can cause the voltage to sag, increasing the current draw and subsequently the heat. Always match your power supply capacity to the total current requirements of your motors plus a 20% safety margin. <h2> Can the L298N DC Motor Driver Module Handle Stepper Motors in Addition to DC Motors? </h2> While the L298N DC Motor Driver Module is primarily marketed for brushed DC motors, it can technically handle stepper motors, but the answer is nuanced: it is not the optimal choice for most stepper applications due to its lack of microstepping capabilities and high current ripple. It can drive unipolar or bipolar stepper motors in full-step or half-step modes, but it will struggle with high-resolution positioning and may cause vibration or missed steps under load. For precise positioning tasks, a dedicated stepper driver like the A4988 or DRV8825 is superior. However, for simple rotation tasks where precise step counting is not critical, the L298N serves as a functional alternative. The fundamental difference lies in how the motors are driven. DC motors require simple on/off signals to change direction and speed, which the H-Bridge in the L298N handles perfectly. Stepper motors, however, require precise timing and current regulation to move one step at a time. The L298N provides the switching capability but lacks the internal current regulation and microstepping algorithms found in dedicated stepper drivers. In a recent project involving a simple automated door opener, I utilized the L298N to drive a small stepper motor. The door opened and closed reliably because the torque requirements were low and the step resolution needed was coarse. However, when the same setup was used for a 3D printer extruder, the motor missed steps frequently because the L298N could not maintain the precise current levels required for smooth microstepping. If you decide to use the L298N with a stepper motor, you must configure your code to use full-step or half-step sequences. You cannot rely on the library functions designed for DC motors. <dl> <dt style="font-weight:bold;"> <strong> Full-Step Mode </strong> </dt> <dd> A driving mode where the stepper motor moves in large increments, providing maximum torque but lower resolution. </dd> <dt style="font-weight:bold;"> <strong> Half-Step Mode </strong> </dt> <dd> A driving mode that alternates between full-step and micro-step positions, doubling the resolution and reducing vibration. </dd> <dt style="font-weight:bold;"> <strong> Current Limiting </strong> </dt> <dd> The ability to restrict the current flowing to the motor coils to prevent overheating and ensure smooth operation. </dd> </dl> For users who need to drive both DC and stepper motors on the same board, the L298N can handle the DC motors, but you should pair it with a dedicated stepper driver for the stepper motor. This hybrid approach maximizes the versatility of your Arduino setup. When using the L298N for stepper motors, ensure that the voltage supplied to the motor terminals is within the recommended range (typically 5V to 12V for small steppers. Higher voltages can cause the L298N to overheat rapidly when driving the inductive loads of stepper coils. <h2> Expert Advice for Maximizing the Lifespan of Your L298N DC Motor Driver Module </h2> To ensure your L298N DC Motor Driver Module lasts for years of projects, the key is to treat it as a high-stress component that requires maintenance and careful handling. My expert advice is to always prioritize thermal management and power supply stability. Never attempt to drive motors that exceed the module's current rating, even for short periods, as this can cause irreversible damage to the internal transistors. Furthermore, always verify your wiring before powering on the system. A single reversed wire can send a surge of current through the driver, destroying it instantly. I recommend using a multimeter to check for short circuits between the motor terminals and the logic pins before connecting the battery. Regular maintenance is also crucial. If you use the module frequently, inspect the screw terminals for tightness and check the heatsink for dust accumulation. Dust acts as an insulator and can trap heat, leading to premature failure. Cleaning the heatsink with compressed air every few months can significantly extend the module's life. Finally, consider upgrading to a more advanced driver like the TB6612FNG if you find the L298N's heat generation unacceptable for your specific application. The TB6612FNG offers similar current capabilities with much better efficiency and less heat, making it a modern alternative for serious robotics projects. However, for the vast majority of hobbyist and educational projects, the L298N remains the gold standard for its balance of cost, availability, and performance.